4D毫米波雷达改善了3D毫米波重大缺陷,是智驾感知层技术路线的一支。
实现汽车智能驾驶需要感知层、决策层、执行层三大核心系统的高效配合,其中感知层通过传感器探知周围的环境,目前市场上主流的汽车智能驾驶感知系统包括视觉感知、超声波感知、毫米波感知、激光感知等技术路线。
分支毫米波雷达是通过天线发射调频连续波(FMCW),利用反射回波与发射波的时间差可计算出目标距离。此外,毫米波雷达可也基于多普勒原理,通过发射与反射信号的频率差异可以精准测量目
目前主流毫米波雷达主要功能为测角、测距与测速,故也称之为3D毫米波雷达。此前特斯拉Auto Pilot就是由3D毫米波提供运算支持,但是3D毫米波雷达固有的缺陷为无法测量物体高度,从而使其不能识别前方静止物体是否会对车辆通行产生影响。
除此之外,3D毫米波雷达另一个缺陷是信噪比太低,存在大量误测。当视觉感知结果与3D毫米波雷达的结果发生冲突的时候,通常会屏蔽掉后者,这或是特斯拉Auto Pilot出现多次事故的原因。2021年5月,特斯拉宣布为北美市场制造的Model 3和Model Y将不配备毫米波雷达,Auto Pilot将由摄像头系统提供运算支持。
4D毫米波雷达相比传统雷达,增加了俯仰角的测量信息,并且角度分辨率可达到亚度(<1°)级别,能够通过输出大量的测量点清晰地呈现出目标障碍物的轮廓。4D成像雷达也能通过神经网络技术,根据呈现的点云图像信息,对道路的使用者和障碍物进行目标检测及分类,可在最远300m处检测、区分、追踪多个静止和移动的目标。此外,4D成像雷达在前前车刹车,防止连续追尾以及大光比、恶劣天气等场景下能够保持较好的性能。
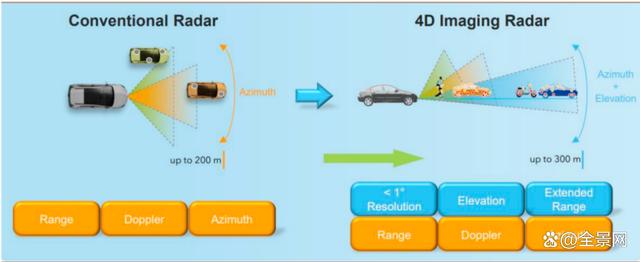
资料来源:NXP官网
